Mbot具身智能实验室
🏛️ 实验室介绍
欢迎来到 Mbot具身智能实验室!
- Mbot实验室依托东华大学信息与智能科学学院,于2025年1月成立,实验室位于东华大学松江校区2号学院楼226室。
- 实验室专注于具身智能领域的基础理论、前沿技术与创新应用研究,研究方向涵盖但不限于模仿学习、视觉-语言-动作模型、视觉语言导航等,致力于推动机器智能体在感知、理解与行动方面的发展。
- 欢迎对具身智能感兴趣的师生加入我们!
Welcome to the Mbot Embodied Intelligence Laboratory!
- The Mbot Lab, affiliated with the School of Information and Intelligent Science at Donghua University, was established in January 2025 and is located in Room 226, Building 2.
- Our laboratory focuses on fundamental theories, cutting-edge technologies, and innovative applications in the field of embodied intelligence. The research areas include, but are not limited to, imitation learning, vision-language-action models, and vision-language navigation.
- We are committed to advancing the integrated development of perception, understanding, and action in intelligent agents. We warmly welcome students and researchers who are interested in embodied intelligence to join us!
📸 实验室展示

实验室整体布局
团队大合照

实验室代表王彦栋应邀在ROSCON 2025国际大会上,就StarTouch机械臂的具身智能探索发表演讲

团队受邀走进东华附小,为学生们带来一场关于具身智能的科普讲座
您可以点击箭头,也可以在手机上左右滑动。
🎯 研究项目展示
具身智能框架MLerobot
该框架基于huggingface开源框架Lerobot框架研发,结合Mbot实验室的实验设备和算法研发,针对多种异构机器人进行了适配,能够快速生产统一格式具身数据集,集成模仿学习、强化学习、传统运动控制算法,能够快速进行模型训练、仿真验证和真机部署。

Xdog带臂机器狗平台
该平台基于低成本机器狗和机械臂硬件平台,主打具身智能教育培训和家庭陪伴服务市场,以模仿学习和强化学习作为硬件平台的算法灵魂,打造一个好玩、易学、好交互的智能机器狗。
自研星触机械臂
Mbot实验室星触项目团队自主研发具身智能机械臂套件,这是一款面向科研与教育的六自由度操作臂平台。自主研发、高精度、开放接口;从课堂到实验室,从模仿学习到大模型控制(VLA),让具身智能触手可及。
方舟无限+VR摇操平台
采用方舟无限机械臂配合PICO4进行VR摇操采集数据

灵巧手研究平台
采用linkhand进行灵巧手通用平台
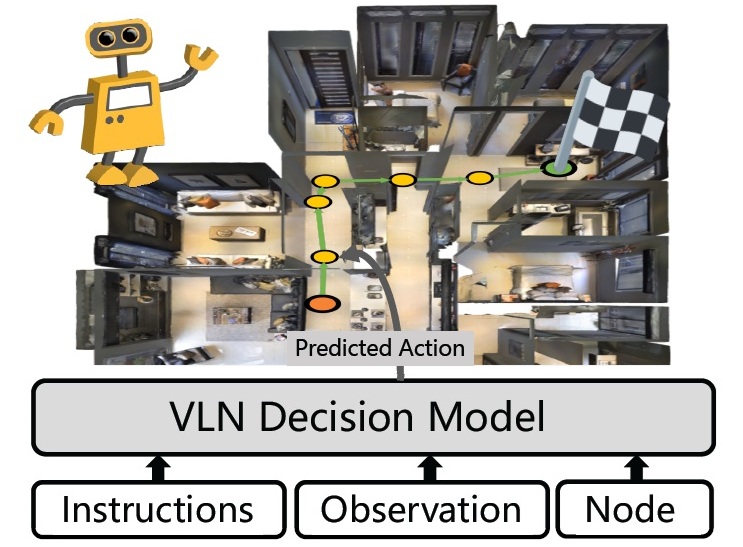
视觉语言导航
研究前沿的视觉语言导航算法,推动机器智能体的发展

半身人形机器人研究
研究玄雅半身双臂人形机器人平台

XeLerobot
研究XeLeRobot家用双臂机器人平台
⚙️ 具体项目展示
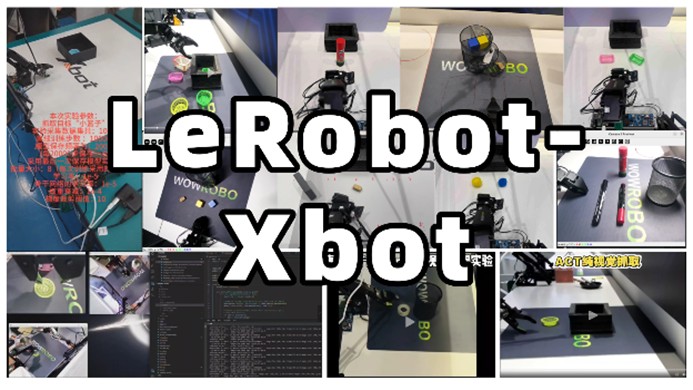
具身智能LeRobot平台
该框架基于huggingface开源框架Lerobot框架研发,结合Mbot实验室的实验设备和算法研发,针对多种异构机器人进行了适配,能够快速生产统一格式具身数据集,集成模仿学习、强化学习、传统运动控制算法,能够快速进行模型训练、仿真验证和真机部署。
ACT: Koch机器人平台多目标抓取实验,针对位置、种类、颜色、背景等进行充分泛化,实验了良好的效果。
Diffusion Policy: Koch机器人双臂平台进行协同操作,系统运行稳定,能够有效的完成预定任务。
SmolVLA: 在SO100平台上,验证了具身前沿算法SmolVLA,实现了优于ACT的性能。
XDog带臂机器狗平台
该平台基于低成本机器狗和机械臂硬件平台,主打具身智能教育培训和家庭陪伴服务市场,以模仿学习和强化学习作为硬件平台的算法灵魂,打造一个易学、好交互的智能机器狗。该项目获得由蚂蚁集团、清华大学主办的前沿科技探索社区(ATEC)赛事亚军。
带臂机器狗实现人机交互
虚拟环境下进行训练
真机演示
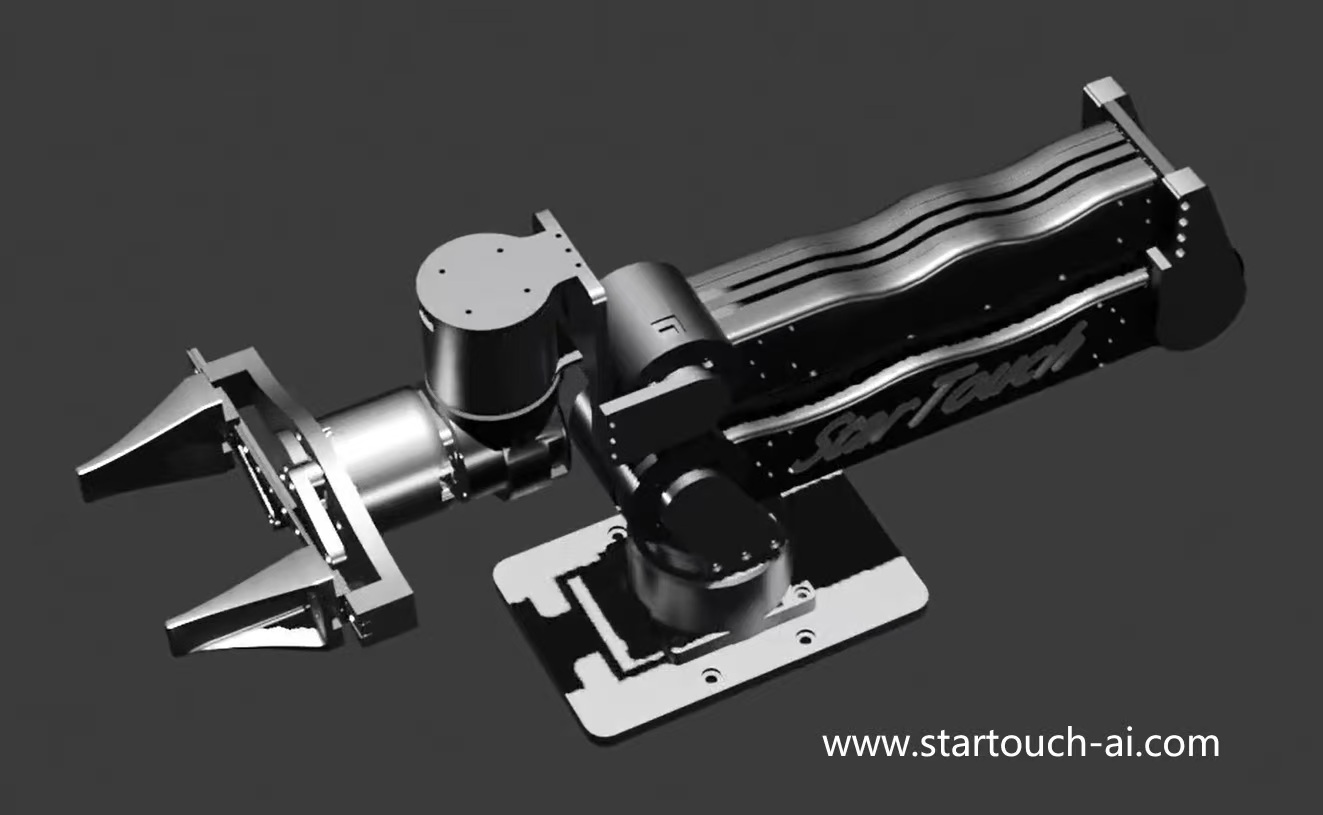
自研星触机械臂
Mbot实验室星触项目团队自主研发具身智能机械臂套件,这是一款面向科研与教育的六自由度操作臂平台。自主研发、高精度、开放接口;从课堂到实验室,从模仿学习到大模型控制(VLA),让具身智能触手可及。目前已上市,欢迎交流咨询(http://www.startouch-ai.com/)。
星触机械臂爆炸图
星触机械臂实现主从臂遥操作
星触机械臂进行算法部署
📱 联系我们
📍 地址
Mbot具身智能实验室
东华大学松江校区 2 号学院楼 226 室
上海市松江区
☎ 联系方式
电话:021-00000000
邮箱:mzhao4@dhu.edu.cn
🕒 办公时间
周一至周五(8:00 - 22:00)
节假日有人,欢迎交流访问,来前请预约